
Generelle Erforschung von Regelkreisen zur Maschinensteuerung unter geodätischen Aspekten.
Auslegung der Regelkreise zur optimalen Integration von zielverfolgenden Tachymetern als Positionssensoren.
Untersuchung geometrischer Führungsaufgaben im Genauigkeitsbereich weniger Millimeter.
Zur dreidimensionalen Führung von modernen Baumaschinen, wie z. B. Gleitschalungsfertiger, Gräder, oder Dozer werden zielverfolgende Tachymeter oder GPS-RTK eingesetzt. Diese gilt es, neben weiteren Sensoren, wie z. B. Neigungssensoren, als positionsbestimmende Sensoren in die Regelkreise zur Maschinensteuerung zu integrieren.
Für hochgenaue Führungsaufgaben im Bereich weiniger Millimeter können auf Grund der Messgenauigkeit nur Tachymeter zum Einsatz gebracht werden. Da aber selbst modernste zielverfolgende Tachymeter wegen ihrer relativ geringen Abtastrate von bis zu 10Hz und einer Totzeit von bis zu mehreren hundert Millisekunden für eine Regelung an sich wenig geeignet sind, können nur sehr langsam bewegte Maschinen mit hoher Genauigkeit geometrisch geführt werden.
Das beschriebene dynamische Verhalten von zielverfolgenden Tachymetern führt dazu, dass in Kurven die aktuelle Position der Maschine zu spät ermittelt wird – es kommt zu größeren Abweichungen zur Soll-Trajektorie, die von der Regelung ausgeglichen werden müssen.
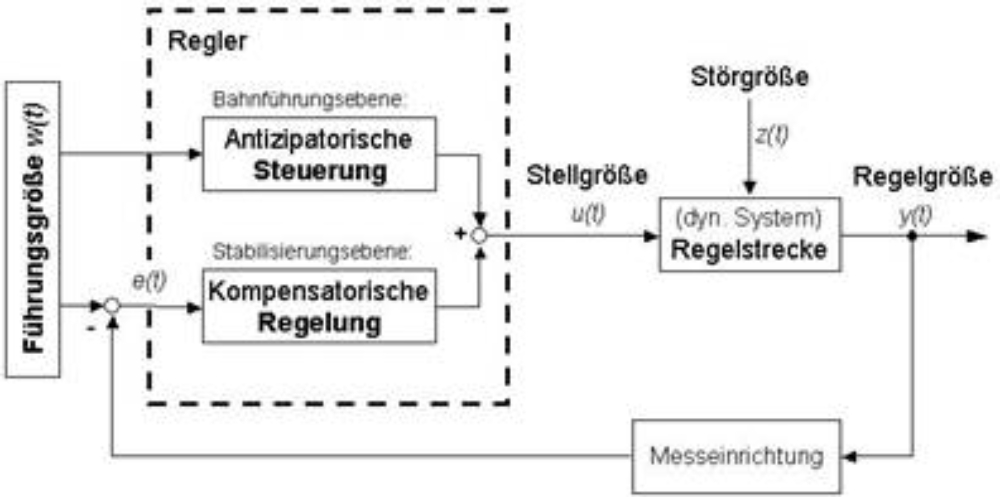
Analysiert man das menschliche Regelverhalten bei der manuellen Maschinenführung, so lassen sich ähnlich ungünstige dynamische Eigenschaften wie die eines zielverfolgenden Tachymeters erkennen. Nur ist der Mensch in der Lage den zukünftigen Verlauf der Soll-Trajektorie mit in sein Regelverhalten zu integrieren – er antizipiert. So kann eine Vorsteuerung erfolgen, die nur noch geringe Abweichungen zur Nachregelung übrig lässt. In Abbildung 1 ist schematisch ein Regelkreis mit antizipatorischer Vorsteuerung dargestellt.
Diese theoretischen Erkenntnisse gilt es im Experiment und später in der Praxis umzusetzen und deren Potenzial zu erforschen.
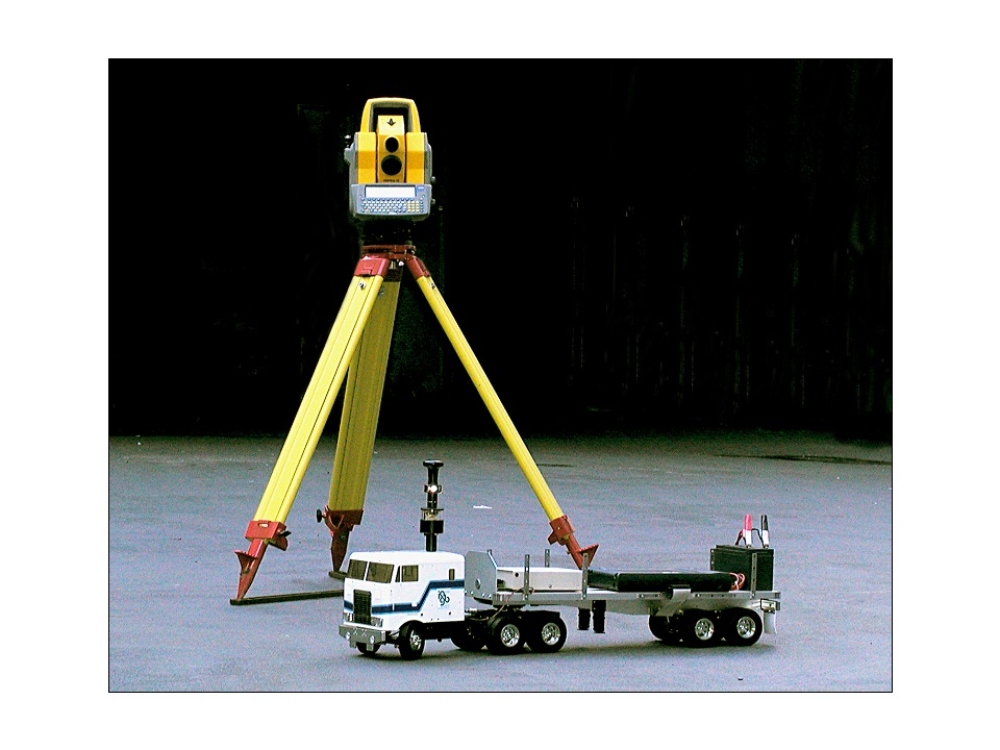
Experiment mit Modell-Lkw:
Die experimentelle Umsetzung erfolgt mit dem in Abbildung 2 dargestellten Modell-Lkw (Maßstab 1:14). Dieser soll automatisch auf einer vorgegebenen Trajektorie geführt werden. Als Positionssensor wird ein Tachymeter (Leica TCP1201) in den Regelkreis integriert. Die Abweichung von dieser soll dabei 5mm nicht überschreiten. Das oben angerissene Regelkonzept mit antizipatorischer Vorsteuerung wird unter Nutzung von LabView® als Entwicklungsplattform umgesetzt. Eine ausführliche Beschreibung des Experiments kann in (Gläser 2003) nachgelesen werden.