
Aims:
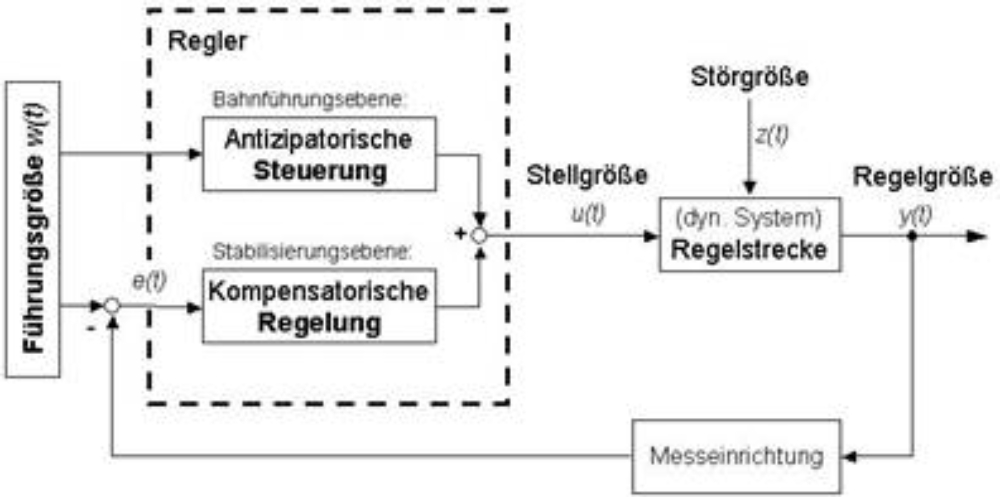
If the human control behaviour in case of manual machine control is analysed, unfavourable dynamic characteristics similar to a tracking tachymeter can be realized. A human is able to integrate the future track of the desired trajectory into his manual control behaviour – he anticipates. Hence a precontrol is established, that leaves only small deviations for recontrol. Figure 1 schematically shows a closed-loop system with anticipatory precontrol.
This theoretical knowledge is to be realized experimentally and later in practice and its potential is to be investigated.
Experiment with model truck:
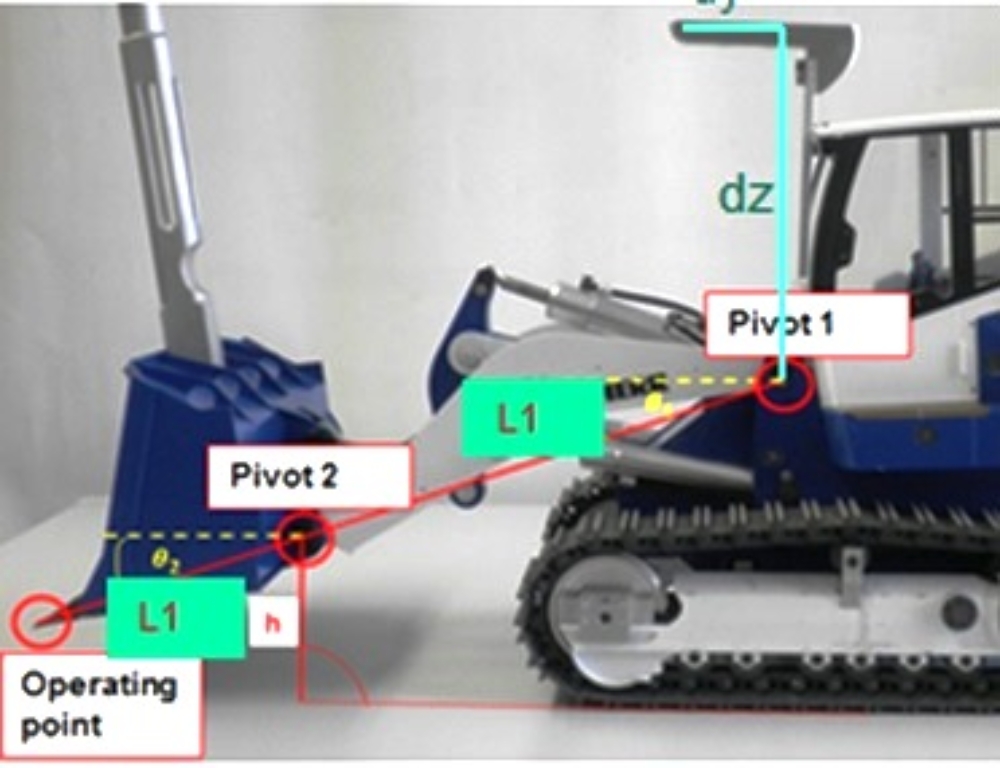
Experimental realization is effected with the model truck (scale 1:14), show in picture 2. The truck is automatically guided on a predetermined trajectory. A tachymeter (Leica TCP 1201) is integrated into the closed-loop system. The deviations should not exceed 5 mm. The mentioned control concept with anticipatory precontrol is realized in LabView®. A detailed experiment description can be found in (Gläser 2003).

Erste Ergebnisse:
First results:
Figure 3 shows as a first result the deviation of the model truck to a reference trajectory. The deviations of automatic control with and without precontrol are compared. The speed was increased to 20cm/s, contrary to the speed of 1-2 cm/s used in practice (e.g. slip-form pavers). It can easily be recognized that the anticipatory precontrol increases the quality of automatic guidance considerable, and the aim of a maximum deviation of 5 mm can be reached despite a speed of 20 cm/s.

Publications:
- Beetz, A., Schwieger, V.: (2008) Integration of Controllers and Filter Algorithms for Construction Machine Guidance. 1st International Conference on Machine Control and Guidance, Zürich, Schweiz, 24.-26-06.2008.
- Schwieger, V., Beetz, A.: (2007) Optimierung von Regelalgorithmen zur Baumaschinensteuerung am Beispiel eines Simulators. Beiträge zum 15. Internationalen Ingenieurvermessungskurs, Graz, Herbert Wichmann Verlag, Heidelberg, 17.20.04.2007.
- Gläser, A.(2005): A Modular System for Guidance and Control Applications for Construction Machines. In: Grün, Kahmen (Eds.): 7th Conference on Optical 3-D Measurement Techniques, Volume I, pp. 307-316, Vienna. (Kurzfassung)
- Gläser, A., Schollmeyer, R. (2004): Messwerterfassung und –synchronisation in Multisensorsystemen. In: Beiträge zum 58. DVW-Seminar, Kinematische Messmethoden – Vermessung in Bewegung, Wißner Verlag, Augsburg.
- Gläser, A. (2003): Steuerung autonomer Baumaschinen - Ein Simulator. In: Virtuelle Instrumente in der Praxis, National Instruments-VIP2003, Hüthig Verlag, München.
Diploma Thesis:
- Beetz, A. (2003): Entwicklung ausgewählter Komponenten eines Regelkreises zur Fahrzeugsteuerung und deren Realisierung in einem Testsystem. Diplomarbeit am IAGB, unveröffentlicht.