Project description IntCDC RP16
Within the framework of the cluster of excellence “Integrative Computational Design and Construction for Architecture (IntCDC)” a specific project is dedicated to the development of a robotic cyber-physical construction (CPC) platform for the assembly of long-span buildings and structures. The CPC platform is a tracked mini crane, equipped with a wearable haptic interface for non-routine assembly tasks and which operation is fully automated.
For fully automated operations of the CPC platform localization is crucial. For this, a precise, millimeter accuracy position as well as the attitude, defined by the attitude angles roll , pitch and yaw , is needed. The position and attitude information, which is termed „pose“ in the language of robotics and „state vector“ in geodetic context, is provided to the appropriate control loops to guide the CPC platform.
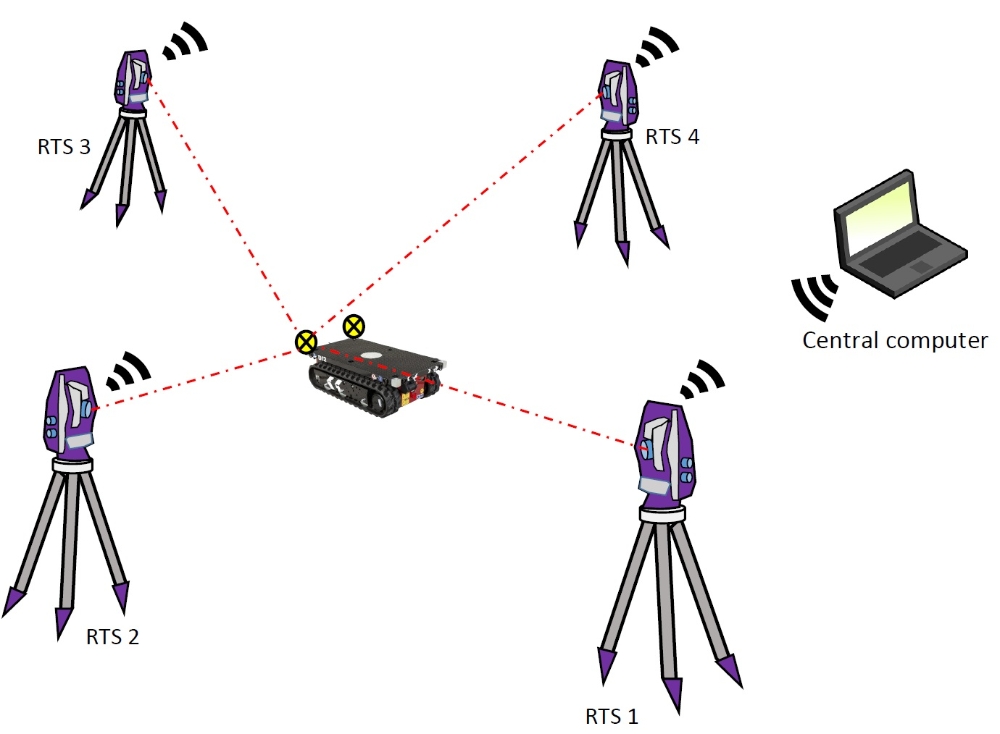
Due to the accuracy requirements of 2-4 millimeter for positions robotic total stations (RTS) are planned to be employed. The use of four RTSs for simultaneous measurements in a so-called RTS network is proposed, to counteract environmental interruptions of the line of sight (LoS) between the RTS and the reflector due to dynamic scenarios on construction sites. In an exemplary case, where the LoS of one RTS gets interrupted, the positioning will be assured by the remaining three RTSs. For the measurements, two different configurations are planned to be implemented and investigated by a geodetic network analysis. In the first configuration all four RTSs measure to one single prism, which is attached to the CPC platform. The attitude angles are measured and provided by an inertial measurement unit (IMU). In the second configuration two prisms are attached to the CPC platform, whereby two RTSs measure to prism one and the remaining two RTSs measure to prism two. This second configuration additionally allows the derivation of attitude angles from RTS measurements. The attitude data can be used directly or elaborated and fused as redundant data set with the IMU measurements.
The research focuses on the geodetic network analysis, for derivation of statements and recommendations for favourable geometric constellations of measurement equipment and CPC platform as well as investigations and development of methods for the determination of the temporal synchronisation error. The synchronisation error will be analyzed either for single RTS as well as between the four RTSs within the RTS network. The reduction of the impact of the synchronisation error on position determination should be aimed at with hardware, software and mathematical optimizations.
The project is funded by the DFG.
