Map Matching relates a determined position to the digital road network; we talk about logical positioning.
Procedure:
Autonomous car navigation systems require the exact knowledge of the vehicle’s position with respect to the digital road network for planning an optimal route, for optimal guidance to the destination and for the generation of driving recommendations (turn by turn).
The position determined in a coordinate system and its precision is not important, but the logical relation between vehicle's position and digital map is essential. This task is denoted as map matching.

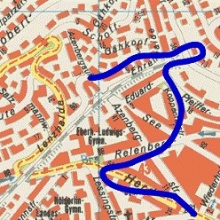
Map-based positioning: example of the on-board autonomous vehicle navigation system
Different map matching techniques were developed which compare the form of the driven way with the digital map in curvature pattern, angular pattern and trajectories in cartesian coordinates.They are called curvature matching, angle matching and coordinate matching.
The decision for a map matching method is driven at first by the systematic error behaviour of the used sensors

Results:
Different tests with motor vehicles and rail vehicles showed that positioning based on map matching leads to an accuracy relatively to the digital road network of one meter and better. But map matching techniques fail for long straight ways and chessboard road patterns.
Publications:
- Wiltschko, T., Möhlenbrink, W.: Bordautonome Ortung von Schienenfahrzeugen mit Map-Matching-Technologie. ZEVrail, Heft Juni / Juli, 2005
- Möhlenbrink, W., Schwieger, V.: Taxy Guidance using Map Matching Technology. Proceedings on International Symposium on “Navigation in General Aviation”, AVIGEN 2004, Linköping, Schweden, 9.-10.10.2004.
- Gläser, A., Schollmeyer, R.: Bordautonome Ortung von Schienenfahrzeugen. DGON-Symposium, TRANSPONDER 2003, Hannover 2003.
- Czommer, R.: Genauigkeitssteigerung fahrzeugautonomer Ortungsverfahren durch Map-Matching-Verfahren. POSNAV 2001, DGON Symposium Positionierung und Navigation, Dresden, März 2001
- Czommer, R.: Leistungsfähigkeit fahrzeugautonomer Ortungsverfahren auf der Basis von Map-Matching-Techniken, Deutsche Geodätische Kommission Reihe C Nr.535, München, 2000.
- Czommer, R.: Fahrzeugortung mit Map-Matching-Technologien. Ingenieurvermessung 2000, TU München, 13.-17. März 2000.
- Czommer, R., Möhlenbrink, W.: Multi-Sensor Map Matching Concepts for Positioning of Road and Rail Vehicles. Proceedings of International Workshop on Mobile Mapping Technology, Bangkok 1999.
Contact:

Volker Schwieger
Prof. Dr.-Ing. habil. Dr. h.c.Director of the Institute