Map-Matching stellt den Bezug zwischen einer Position und dem digitalen Straßennetz her; es wird daher von logischer Ortung gesprochen.
Vorgehensweise:
Autonome Fahrzeugnavigationssysteme erfordern zur Planung optimaler Routen, zur Zielführung und zur Generierung rechtzeitiger Fahrempfehlungen die straßengenaue Kenntnis der Fahrzeugposition auf dem Straßennetz. Entscheidend ist nicht die in einem bestimmten Koordinatensystem durchgeführte Ortung und ihre Genauigkeit, sondern der logische Bezug zwischen Fahrzeugposition und digitaler Karte. Diese Aufgabe wird als Karteneinpassung (Map-Matching) bezeichnet.

Kartengestützte Ortung: Beispiel Bordautonome Fahrzeugnavigation
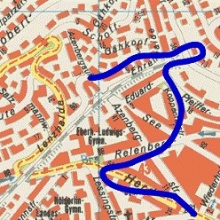
Zum Vergleich verschiedener Ortungsverfahren wurden unter normalen Verkehrsbedingungen Messfahrten mit DGPS und Differentialodometer (ABS-Sensoren der Vorderräder) in der Stadtmitte von Stuttgart durchgeführt. Das Ergebnis der Ortung ist in der nebenstehenden Grafik dargestellt:
In Häuserschluchten treten im DGPS Signal erhebliche Sprünge von bis zu 70m auf.
Die Koppelortung mit Differentialodometer zeigt das typische Anwachsen der Positionsfehler mit längerer Messfahrt.
Die Kombination von Differentialodometer mit DGPS überbrückt die DGPS- Ausfälle und verbessert deutlich das starke Anwachsen der Positionsfehler beim reinen Differentialodometer

Ergebnisse:
Verschiedene Versuche mit Kraftfahrzeugen und Schienenfahrzeugen zeigen, dass durch Map Matching die Positionsbestimmung relativ zum abgespeicherten Netz in der Genauigkeitsklasse ein Meter und besser möglich ist. Allerdings versagen Map Matching Techniken bei langen, sehr schwach gekrümmten Strecken und bei schachbrettmusterartigen Straßennetzen.
Ansprechpartner:

Volker Schwieger
Prof. Dr.-Ing. habil. Dr. h.c.Institutsleitung